Lập trình robot với ROS - Phần 4: Các khái niệm (tiếp theo)
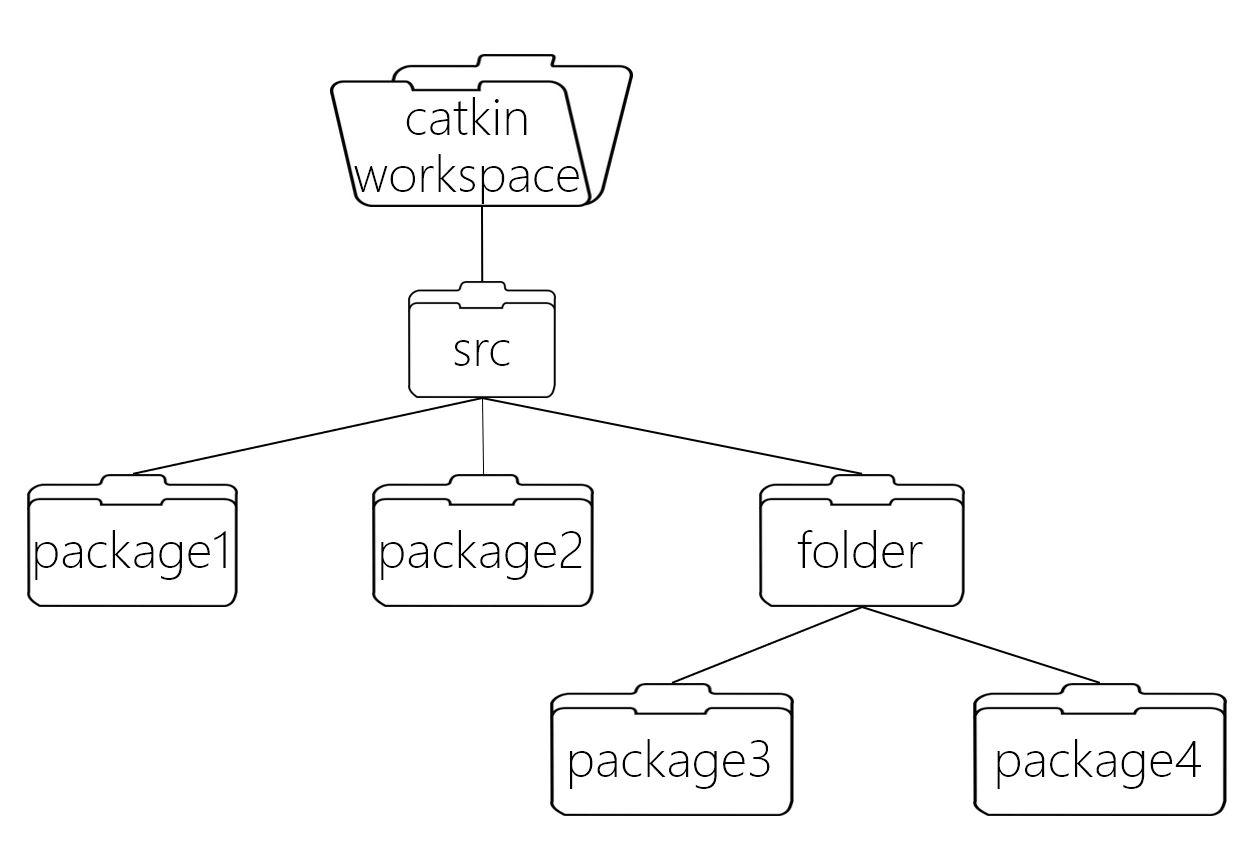
Thời gian qua có một vài bạn quan tâm đến series này đã nhắn tin với mình qua fanpage nên mình quyết định sẽ thực hiện series này nhiều hơn. Trong bài trước mình đã tìm hiểu về ROS Graph và roscore. Tiếp theo trong loạt bài này chúng ta sẽ tìm hiểu về catkin, Workspaces, và ROS Packages

Lập trình robot với ROS - Phần 4: Các khái niệm
Trở lại với chuỗi bài viết về ROS, cũng một thời gian khá lâu do mình cần phải tìm hiểu về lĩnh vực này thêm. Trong bài viết này để tiếp tục chặng hành trình chúng ta cùng tìm hiểu về các khái niệm
Lập trình robot với ROS - Phần 3: Những điều cần biết về ROS Noetic
Chào mọi người, ở phần bài trước chúng ta đã tìm hiểu tổng quan về ROS Noetic và tiến hành cài đặt môi trường phát triển trên hệ điều hành Ubuntu 20.04 với phiên bản ROS Noetic. Bài này mình sẽ tổng kết lại 1 số ý về ROS Noetic.
Lập trình robot với ROS - Phần 2: Cài đặt môi trường phát triển
Chào mọi người như trong phần trình bày trước mình đã giới thiệu về việc lập trình ROS các loạt bài viết này chúng ta chủ yếu tìm hiểu về phát triển ứng dụng với ROS với hệ điều hành Ubuntu và ngôn ngữ lập trình chính là Python

Lập trình robot với ROS - Phần 1: Giới thiệu tổng quan
Bạn muốn phát triển các ứng dụng robot mới, nhưng không biết cách viết hệ thống ánh xạ hoặc nhận dạng đối tượng? Bạn không đơn độc, nhưng bạn chắc chắn không phải là không có sự giúp đỡ. Bằng cách kết hợp các ví dụ thực tế với kiến thức quý giá từ cộng đồng Hệ điều hành Robot (ROS), bài viết thực tế này cung cấp một bộ công thức thúc đẩy để giải quyết các trường hợp phát triển robot cụ thể.